Bipedalism is standing, or moving for example by walking, running, or jumping, on two appendages (typically legs). An animal or machine that usually moves in a bipedal manner is known as a biped, meaning "two feet" (Latin bi = two + ped = foot).

{kind=link}
An ostrich, one of the fastest of living bipeds
{kind=link}
A Man Running - Edward Muybridge
Diversity and evolution of bipedalism
Types of bipedal movement
There are a number of states of movement commonly associated with bipedalism.
1. Standing. Staying still on both legs. In most bipeds this is an active process, requiring constant adjustment of balance.
2. Walking. One foot in front of another, with at least one foot on the ground at any time.
3. Running. One foot in front of another, with periods where both feet are off the ground.
4. Hopping. Moving by a series of jumps with both feet moving together.
Bipedal animals
Bipedal movement has evolved a number of times other than in humans, mostly among the vertebrates. The most obvious example of bipedal movement is among the birds and their ancestors the theropod dinosaurs. All dinosaurs are believed to be descended from a fully bipedal ancestor, perhaps similar to Eoraptor. Indeed, among their descendants, the larger flightless birds, the ratites, such as the ostrich, perhaps epitomise the capacity to move bipedally, able to reach speeds of up to 65 km/h. Likewise many theropod dinosaurs, especially the maniraptors, are believed to have been able to move at similar speeds. Bipedal movement also re-evolved in a number of other dinosaur lineages such as the iguanodons. Some extinct members of the crocodilian line, a sister group to the dinosaurs and birds, have also evolved bipedal forms - a crocodile relative from the triassic, Effigia okeeffeae, was believed to be bipedal [1]. Larger birds tend to walk with alternating legs, whereas smaller birds will often hop. Penguins are interesting birds with regard to bipedality as they tend to hold their bodies upright, rather than horizontal as in other birds.
Bipedal movement is less common among mammals, most being quadrupedal. The largest mammalian group using bipedal movement are the kangaroos and their relatives. However these tend to move mostly by hopping, which is quite different from humans and many birds. There are also various groups of hopping rodents, such as the kangaroo rats. A primate, the sifaka, also moves by hopping when on the ground. Possibly the only mammals other than humans that commonly move bipedally by an alternating gait rather than hopping are gibbons when on the ground, and giant pangolins.
Limited examples of bipedalism are found in some other mammals. For example the bonobo ape and proboscis monkey, who both live in forests that are often flooded, will wade through water in a bipedal stance. On occasion bonobos and proboscis monkeys, and less frequently some other primates, will also walk or stand bipedely on land. A number of other animals, such as rats, will squat on their hindlegs in order to manipulate food objects. The raccoon often stands erect or squats in water to use its hands to manipulate food and rocks/sticks. Beavers will also move bipedally at times when carrying branches. Some animals, such as the bear, may raise up and move bipedally during physical confrontation, so as to better be able to use their forelegs as weapons. Also a number of mammals, such as ground squirrels or meerkats will stand on their hind legs, but not walk on them, in order to survey their surroundings. Finally, gerenuk antelope are known to stand on their hind legs in order to eat leaves from trees. The extinct giant ground sloth had hip joints whose form indicates that they also did this. Another extinct group, the bizarre rhino/gorilla-like chalicotheres may also have behaved similarly. One unusual form of limited bipedalism is the spotted skunk which when threatened stands on its forelimbs. This allows the skunk, while still facing the attacker, to direct its anal glands towards the attacker. The anal glands can fire an offensively odorous oil.
Bipedalism is unknown among the amphibians. Among the non-archosaur reptiles bipedalism is rare, but it is found in the "reared-up" running of certain lizards. An interesting example is found in at least one genus of basilisk lizard that by this method can run across the surface of water for some distance. Bipedalism in the form of reared-up running can also be found in some insects such as the cockroach. Otherwise bipedal movement is unknown in arthropods. Bipeds are almost exclusively terrestrial animals. However, at least two types of octopus are known to walk bipedally [2]. This form of locomotion appears to allow them to remain somewhat camouflaged while moving quickly, taking a form like a coconut or seaweed and moving on the tips of two of its arms.
Exceptional cases
Many animals that do not use bipedal locomotion in nature can be trained to walk on hind legs. Animals missing limbs due to injury or congenital deformity may adapt to bipedal motion, either on two hind legs or on one front and one back leg. For videos of both kinds of bipedal motion in dogs see [3] and [4]. Some unusual individual primates have also been known to be bipedal. There has been one recorded case of a macaque switching to bipedal walking completely after recovering from a serious illness [5], and at least one example of a captive chimp who only walked upright, Oliver. Some animals can also be trained to walk on front limbs. Humans too, can learn to walk using solely their arms (see handstand and hand walking).
Advantages
Bipedalism and associated traits can offer a species several advantages:
- Improved perception. Some evolutionary biologists have suggested that a crucial stage in the evolution of some or all bipeds was the ability to stand, which generally improves the ability to see (and perhaps otherwise detect) distant dangers or resources.
- Free forelimbs. In vertebrate species, for whom evolution of additional limbs would be an enormous genetic change, it can serve to free the front limbs for such other functions as manipulation (in primates), flight (in birds), digging (giant pangolin), or combat (bears).
- Wading. Raccoons and some primates may adopt a bipedal position in water, allowing them to stand or walk in deeper water while still breathing air.
- Faster movement. In animals without a flexible backbone, such as lizards or cockroaches, bipedalism may increase running speed. However the maximum bipedal speed appears less fast than the maximum speed of quadrapedal movement with a flexible backbone - compare the fastest bipeds the ostrich (65 km/h) or the red kangaroo (70 km/h) with the fastest quadruped, the cheetah ( 103 km/h).
- Greater reach. Gerunuk antelope adopt a bipedal position to browse the leaves from trees.
- Camouflage. It has been speculated that bipedalism in octopuses allows them to move while keeping the rest of their bodies still for camouflage.
- Face attacker while directing anal glands. The defense posture of the spotted skunk, which involves walking on its forelimbs, allows the skunk to face the attacker while simultaneously directing its anal glands at them. The anal glands can squirt an offensive smelling oil.
Evolution
Bipedalism has a number of adaptive advantages, and has evolved indeopendently in a number of lineages.
Lizards
The first known biped is the lizard Eudibamus cursoris whose fossils data from 290 million years ago [6]. Its long hindlegs, short forelegs, and distinctive joints all suggest bipedalism. This may have given increased speed. The species was extinct before the dinosaurs appeared. Some modern lizard species have developed the capicity to run on their hind legs for added speed.
Dinosaurs and birds
Bipedalism also developed independently among the dinosaurs. Dinosaurs diverged from their archosaur ancestors approximately 230 million years ago during the Middle to Late Triassic period, roughly 20 million years after the Permian-Triassic extinction event wiped out an estimated 95% of all life on Earth.[1][2] Radiometric dating of fossils from the early dinosaur genus Eoraptor establishes its presence in the fossil record at this time. Paleontologists believe Eoraptor resembles the common ancestor of all dinosaurs;[3] if this is true, its traits suggest that the first dinosaurs were small, bipedal predators.[4] The discovery of primitive, dinosaur-like ornithodirans such as Marasuchus and Lagerpeton in Argentinian Middle Triassic strata supports this view; analysis of recovered fossils suggests that these animals were indeed small, bipedal predators.
Mammals (excluding humans)
A number of mammals will adopt a bipedal stance in specific situations such as for feeding or fighting. A number of groups of extant mammals have evolved bipedalism as their main form of locomotion including humans, giant pangolins, and macropods. Humans, as their bipedalism has been extensively studied are documented in the next section. Macropods are believed to have evolved bipedal hopping only once in their evolution, at some time no later than 45 million years ago (Burk et al 1998).
References
- Angela Burk, Michael Westerman, Mark Springer. (1998) The Phylogenetic Position of the Musky Rat-Kangaroo and the Evolution of Bipedal Hopping in Kangaroos (Macropodidae: Diprotodontia) Systematic Biology, Vol. 47, No. 3 , pp. 457-474
Humans
There are at least twelve distinct hypotheses as to how and why bipedalism evolved in humans, and also some debate as to when. Evidence points to bipedalism evolving before the expansion in human brain size. The different hypotheses are not necessarily mutually exclusive and a number of selective forces may have acted together to lead to human bipedalism.
Postural Feeding Hypothesis
The postural feeding hypothesis has been recently supported by Dr. Kevin Hunt, a professor at Indiana University. This theory asserts that chimpanzees were only bipedal when they ate. While on the ground, they would reach up for fruit hanging from small trees and while in trees, bipedalism was utilized by grabbing for an overhead branch. These bipedal movements may have evolved into regular habits because they were so convenient in obtaining food. Also, Hunt theorizes that these movements coevolved with chimpanzee arm-hanging, as this movement was very effective and efficient in harvesting food. When analyzing fossil anatomy, Australopithecus afarensis has very similar features of the hand and shoulder to the chimpanzee, which indicates hanging arms. Also, the Australopithecus hip and hind limb very clearly indicate bipedalism, but these fossils also indicate very inefficient locomotive movement when compared to humans. For this reason, Hunt argues that bipedalism evolved more as a terrestrial feeding posture than as a walking posture. As Hunt says, “A bipedal postural feeding adaptation may have been a preadaptation for the fully realized locomotor bipedalism apparent in Homo erectus.”
Provisioning Model
One of the most elaborative theories on the origin of bipedalism is the behavior model presented by C. Owen Lovejoy. Lovejoy theorizes that the evolution of bipedalism was a response to a monogamous society. As hominid males became monogamous, they would leave their families for the day in order to search for food. Once they found food for their family, the hominids would have to bring back the food, and the most effective way of doing this was through bipedalism. Some question whether early hominids really were monogamous though. Some evidence indicates that early hominids, which are proven to be bipedal, were polygamous. Among all monogamous primates, sexual dimorphism is mostly absent, but in Australopithecus afarensis males were found to be nearly twice the weight of females, an attribute scientists would expect in a polygamous species. Lastly, monogamous primates are highly territorial, but fossil evidence indicates that Australopithecus afarensis lived in large groups.
Other Behavioural Models
There are a variety of ideas which promote a specific change in behaviour as the key driver for the evolution of hominid bipedalism. For example, Wescott (1967) and later Jablonski & Chaplin (1993) suggest that bipedal threat displays could have been the transitional behaviour which led to some groups of apes beginning to adopt bipedal postures more often. Others (e.g. Dart 1925) have offered the idea that the need for more vigilance against predators could have provided the initial motivation. Dawkins (e.g. 2004) has argued that it could have begun as a kind of fashion that just caught on and then escalated through sexual selection. And it has even been suggested (e.g. Tanner 1981:165) that male phallic display could have been the initial incentive.
Thermoregulatory Model
The thermoregulatory model explaining the origin of bipedalism is one of the simplest theories on the table, but it is a viable explanation. Dr. Peter Wheeler, a professor of evolutionary biology, proposes that bipedalism raises the amount of body surface area higher above the ground which results in a reduction in heat gain and helps heat dissipation. When a hominid is higher above the ground, the organism accesses more favorable wind speeds and temperatures. During heat seasons, greater wind flow results in a higher heat loss, which makes the organism more comfortable. Also, Wheeler explains that a vertical posture minimizes the direct exposure to the sun whereas quadrupedalism exposes more of the body to direct exposure.
Carrying Models
Charles Darwin wrote that "Man could not have attained his present dominant position in the world without the use of his hands, which are so admirably adapted to the act of obedience of his will" Darwin (1871:52) and many models on bipedal origins are based on this line of thought. Gordon Hewes (1961) suggested that the carrying of meat "over considerable distances" (Hewes 1961:689) was the key factor. Isaac (1978) and Sinclair et al (1986) offered modifications of this idea as indeed did Lovejoy (1981) with his 'provisioning model' described above. Others, such as Nancy Tanner (1981) have suggested that infant carrying was key, whilst others have been quite specific in suggesting stone tools and weapons were the key objects to be carried that drove the change.
Wading Hypothesis
This theory proposes that humans evolved bipedalism as a result of bipedal wading. Mammals that switch from quadrupedalism on land to bipedal wading appear mainly to be found among large primates, especially apes, with relatively few exceptions such as the grizzly bear. Bipedal wading has been observed in the bonobo, chimpanzees, the lowland gorillas, orang utans, baboons and proboscis monkey. Bipedal wading provides the advantage of keeping the head above water for breathing. This theory is part of a general theory of human evolution which often goes by the name of the aquatic ape hypothesis. Kuliukas 2001 argues that the skeletal morphology of the early hominan Australopithecus afarensis is consistent with adaptation for wading in water and that their habitats were probably sufficiently prone to flooding for this behaviour to have been selected for.
Turn-Over Pulse Hypothesis
The theory is part of a general theory of human evolution known as the savanna hypothesis. This theory asserts that a major climate change occurred which induced an onset of drier conditions. These dry conditions severely reduced the amount of wooded habitats in the Pliocene era, about 2.5 million years ago. During this period where the forests became thin, the Australopithecus organisms had to evolve and change their habitats from the forest to grasslands. In order to remain effective in gathering food, the hominids had to travel long distances with food or tools, thus making quadrupedalism extremely inefficient. These hominids evolved into bipeds which made their treks along the grasslands much more efficient.
References
- Darwin, C., "The Descent of Man and Selection in Relation to Sex", Murray (London), (1871).
- Dart, R.A., "Australopithecus africanus: The Ape Man of South Africa" Nature, 145, 195-199, (1925).
- Dawkins, R., "The Ancestor's Tale", Weidenfeld and Nicolson (London), (2004).
- Hewes, G.W., "Food Transport and the Origin of Hominid Bipedalism" American Anthropologist, 63, 687-710, (1961).
- Hunt, K.D., "The Evolution of Human Bipedality" Journal of Human Evolution, 26, 183-202, (1994).
- Isaac, G.I., "The Archeological Evidence for the Activities of Early African Hominids" In:Early Hominids of Africa (Jolly, C.J. (Ed.)), Duckworth (London), 219-254, (1978).
- Jablonski, N.G. & Chaplin, G. "Origin of Habitual Terrestrial Bipedalism in the Ancestor of the Hominidae", Journal of Human Evolution, 24, 259-280, (1993).
- Kuliukas, A., "Wading for Food: The Driving Force of the Evolution of Bipedalism." Nutrition and Health, 16(4), 267-290, (2002). html
- Lovejoy, C. O., "The Origin of Man." Science, 211, 341-350, (1981).
- Tanner, N.M., "On Becoming Human", Cambridge University Press (Cambridge), (1981).
- Wescott, R.W., "Hominid Uprightness and Primate Display", American Anthropologist, 69, 738,(1967).
- Wheeler, P. E., "The Evolution of Bipedality and Loss of Functional Body Hair in Hominoids." Journal of Human Evolution, 13, 91-98, (1984).
- Vrba, E., "The Pulse that Produced Us." Natural History, 102(5), 47-51, (1993).
Physiology of bipedalism
Bipedal movement occurs in a number of ways, and requires many mechanical and neurological adaptations. Some of these are described below.
Biomechanics
Engineers who study bipedal walking or running describe it as a repeatedly interrupted fall. The phenomenon of "tripping" is informative with regards to the "controlled falling" concept of walking and running. The common way to think of tripping is as pulling a leg out from under a walker or runner. In fact, however, merely stopping the movement of one leg of a walker, and merely slowing one leg of a runner, is sufficient to amount to tripping them. They were already "falling", and preventing the tripped leg from aborting that fall is sufficient to cause bipeds to collapse to the ground.
- Standing
Energy-efficient means of standing bipedally involve constant adjustment of balance, and of course these must avoid overcorrection.
- Walking
Efficient walking is more complicated than standing. It entails tipping slightly off-balance forward and to the side, and correcting balance with the right timing. In humans, walking is composed of several separate processes:
- rocking back and forth between feet
- pushing with the toe to maintain speed
- combined intruption in rocking and ankle twist to turn
- shortening and extending the knees to prolong the "forward fall"
- Running
Running is an inherently continuous process, in contrast to walking; a bipedal creature or device, when efficiently running, is in a constant state of falling forward. This is maintained as relatively smooth motion only by repeatedly "catching oneself" with the right timing, but in the case of running only delaying the nearly inevitable fall for the duration of another step.
- Hopping
Musculature
Bipedalism requires strong leg muscles, particularly in the thighs. Contrast in domesticated poultry the well muscled legs, against the small and bony wings. Likewise in humans, the quadriceps and hamstring muscles of the thigh are both so crucial to bipedal activities that each alone is much larger than even the well-developed biceps of the arms.
Nervous system
The famous knee jerk (or patellar reflex) emphasizes the necessary bipedal control system: the only function served by the nerves involved being connected as they are is to ensure quick response to imminent disturbance of erect posture; it not only occurs without conscious mental activity, but also involves none of the nerves which lead from the leg to the brain.
A less well-known aspect of bipedal neuroanatomy can be demonstrated in human infants who have not yet developed toward the ability to stand up. They can nevertheless run with great dexterity, provided they are supported in a vertical position and offered the stimulus of a moving treadmill beneath their feet.
Respiration
A biped also has the ability to breathe whilst it runs. Humans usually take a breath every other stride when their aerobic system is functioning. During a sprint, at which point the anaerobic system kicks in, breathing slows until the anaerobic system can no longer sustain a sprint.
Bipedal robots
{kind=link}
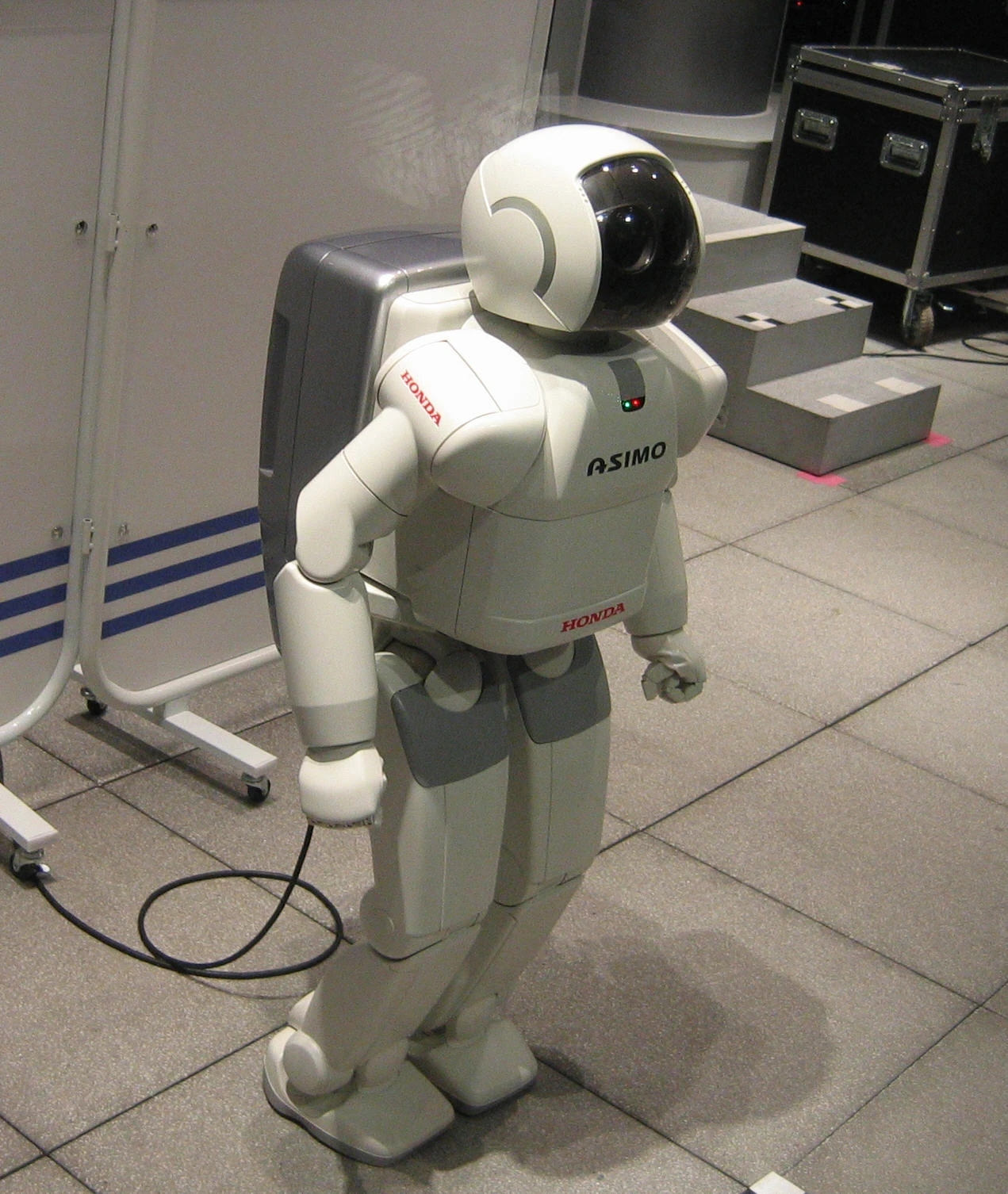
ASIMO - a bipedal robot
For nearly the whole of the 20th century, bipedal robots were very difficult to construct. Robots which could move usually did so using wheels, treads, or multiple legs (see robot locomotion). Increasingly cheap and compact computing power, however, has made two-legged robots more feasible. Some notable biped robots are ASIMO, developed by Honda, HUBO and Albert Einstein HUBO developed by KAIST and QRIO, developed by Sony.
See also
Terrestrial locomotion in animals
External links
- Study pushes bipedalism back 2 million years
- Information about bipedal octopuses, with link to original paper and videos
- Why australopithecines became bipedal
- Time-warp family who walk on all fours
- The dawn of man, article on the evolution of bipedalism
- Comparative bipedalism - how the rest of the animal kingdom walks on two legs
- Video of Faith, a dog born without her front legs and trained to walk upright
- Video of Dominic, a greyhound adapted to non-upright bipedal motion after losing both right legs
- Video of Honda's humanoid robot Asimo running (Dec 16 2004)
- Albert Einstein Hubo: by Hanson Robotics and KAIST

|
This page uses content from Wikipedia. The original article was at Bipedalism. The list of authors can be seen in the page history. As with Paleontology Wiki, the text of Wikipedia is available under the GNU Free Documentation License. |
- ↑ Citation for Permian/Triassic extinction event, percentage of animal species that went extinct. See commentary
- ↑ Another citation for P/T event data. See commentary
- ↑ Hayward, T. (1997). The First Dinosaurs. Dinosaur Cards. Orbis Publishing Ltd. D36040612.
- ↑ Sereno, P.C., C.A. Forster, R.R. Rogers, and A.M. Monetta. 1993. Primitive dinosaur skeleton from Argentina and the early evolution of Dinosauria. Nature 361:64-66.